- Идея объединить в одной системе высокоточный GPS/Глонасс-приемник и георадар ( равно как и магнитометр или другое оборудование) давно успешно реализуется для получения качественных
геофизических данных на археологических памятниках.
В рамках наших исследований на Старо Рязанском археологическом комплексе нами в сотрудничестве с компанией АТВ Алексарт создается Георадарный роботизированный комплекс для автоматизации площадной съемки.

- 1. Компоненты системы.
Комплекс включает в себя следующее оборудование:
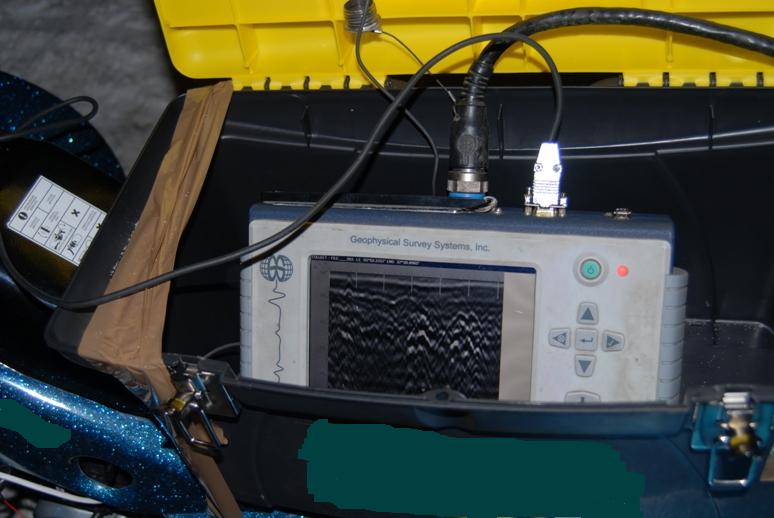
a) Георадар SIR-3000 c набором антенн 5103, 5104 и 5106, которые каждая в отдельности могут быть задействованы при георадарной съемке.
б) Два GPS/Глонасс приемника Maxor, один из которых устанавливается стационарно и посредством радиомодема передает дифференциальные поправки
второму (подвижному), который располагается на самоходном шасси вместе с георадаром и антенной. При этом, если местность открытая и не залесенная, обеспечивается сантиметровая точность позиционирования системы.
в) Собственно самоходное шасси( на база квадрацикла) с бензиновым мотором, большим запасом хода, бортовым компьютером и блоком радиоуправления. Предполагается, что исследуемая поверхность относительно ровная.
г) Внешний компьютер, на который по WI-FI передается информация о положении прибора и видеокартинка с экрана георадара.
- 2.Функциональное назначение.
Прибор осуществляет георадарную съемку с помощью георадара SIR-3000 и антенн 200, 270, 400 Мегагерц.
При этом управление осуществляется по двум схемам:
a) Управление с помощью джостика, с записью георадарных данных и координат местонахождения в память блока управления георадара SIR-3000.
Процесс управления обеспечивается с помощью связи WI-FI. В этой ситуации совершенно необязательно, чтобы оператор находился в непосредственной
близости от прибора. Он может быть далеко и управлять роботом посредством Интернета.


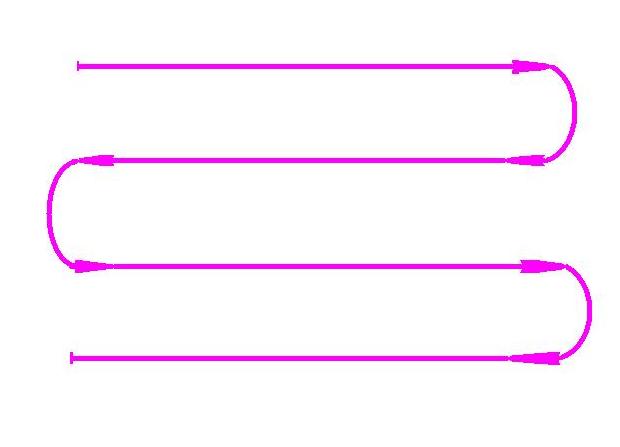
- b) Полностью автоматизированная площадная съемка, когда управление движением прибора осуществляет бортовой компьютер, в
который в свою очередь подаются данные высокоточного GPS/Глонасс приемника. Бортовой компьютер обеспечивает зигзагообразное перемещение антенны
георадара и включение режима георадарной съемки на прямых участках траектории.
-
При этом можно задавать программно расстояния между георадарными профилями, их длину и соответственно все параметры качества съемки.
При такой съемке посредством WI-FI мы получаем на удаленном компьютере траекторию движения робота и видеокартинку с прибора.
В этой ситуации оператор также может быть далеко.
По результатам такой съемки строится трехмерная модель геомассива исследованной территории с точной ( сантиметры) привязкой выявленных объектов к местности и строится высокоточная карта микрорельефа местности.
- Траектория движения прибора обладает свойством повторяемости в том смысле, что если мы захотим ее воспроизвести через некоторое время с целью реализации полученных аномалий, мы легко можем это сделать.
Используемый нами GPS/Глонасс комплект приемников позволяет обеспечить сантиметровую точность позиционирования в режиме RTK.
- 3. Предполагаемые области применения.
а) Изначально прибор создавался для автоматизации поиска погребенных под землей археологических объектов. Это Старая Рязань и Бородинское поле.
б) Кажется интересным приложением нового прибора – картирование неглубоких ( до 4-7 метров) рек и озер со льда.
Дело в том, что в водоемах с не очень грязной водой георадар видит во-первых толщину льда, во-вторых стратиграфирует донные отложения,
в-третьих различает инородные объекты в донных отложениях.
В первую очередь речь идет о затонувших старых ладьях и крупных металлических объектах на дне водоемов.
В силу повторяемости результатов позиционирования возможен выход на места аномалий в теплое время для прямого исследования и подъема на поверхность предметов.